Ultrasonic range sensor example¶
Code¶
def measure : int : {
bool timeout := false;
int echo := 0;
start_counter();
while : read_counter() <= 2000 {
digital_write(7, true);
}
digital_write(7, false);
stop_counter();
start_counter();
while : not (digital_read(1)) and true {
if : read_counter() > 200000000 {
timeout := true;
break;
}
}
stop_counter();
if : not(timeout) and true {
start_counter();
while : digital_read(1) and true {
if : read_counter() > 200000000 {
timeout := true;
break;
}
echo := read_counter();
}
stop_counter();
}
if : timeout and true {
echo := 0;
}
return echo;
}
while : true {
int ping:= measure()*1000;
if : ping > 292200 {
digital_write(4, false);
}
else
{
digital_write(4, true);
}
delay(1000);
}
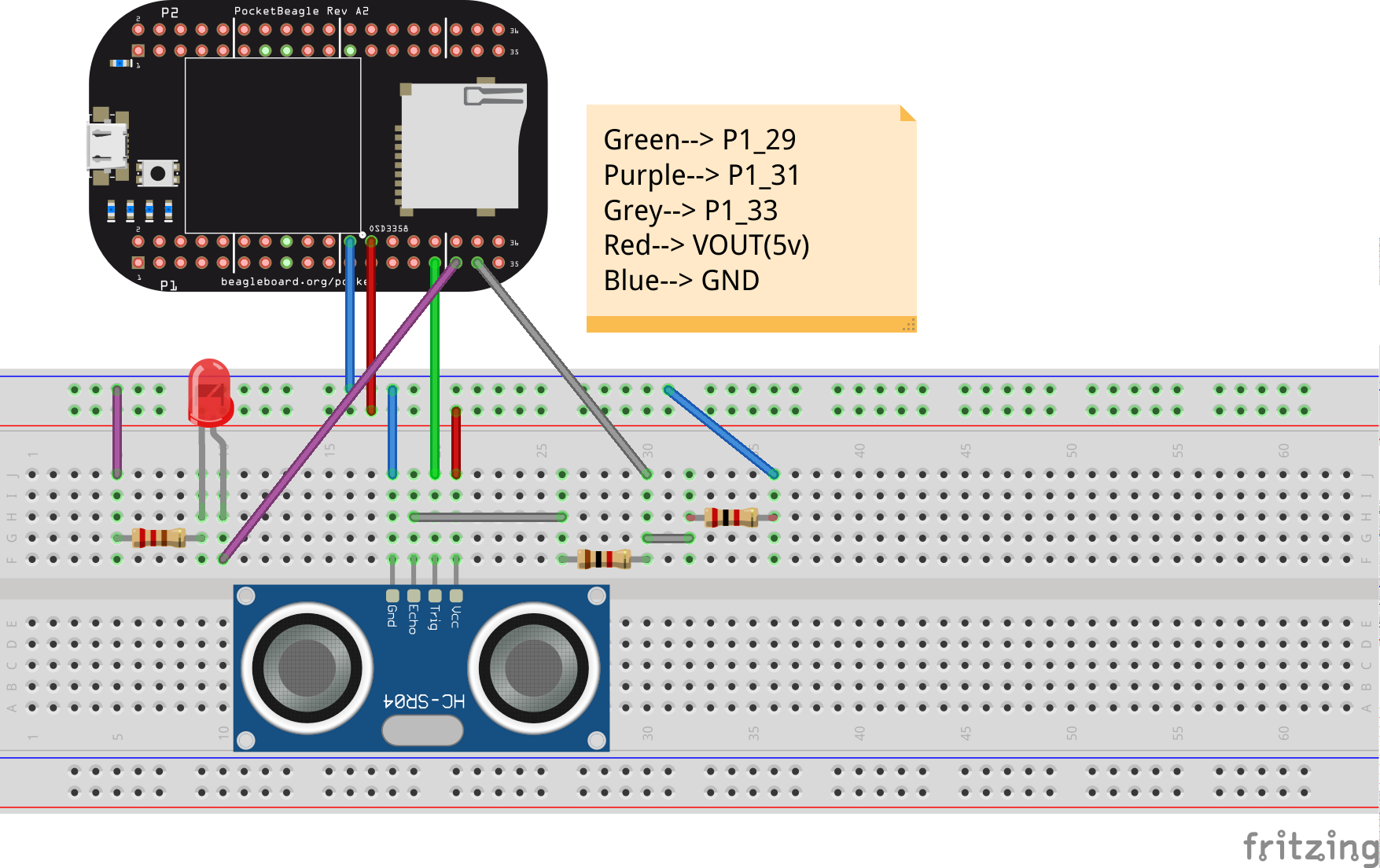
Following code works on PocketBeagle, to use on other boards, please change the pins accordingly.